
ROS, Ubuntu 20.04 LTS에서 진행된 내용입니다.
요약내용
숨겨진 경로에 있습니다. (~./gazebo)
목적
Github에서 만들어진 모델을 사용할 때, 경로를 영구적으로 경로를 추가해서 Gazebo 프로그램 실행때마다 편하게 사용하고자 합니다.
아래처럼 따라하면 됩니다.
- 홈에서 숨겨진 파일을 보기 위해 'ctr + H' 을 누르기
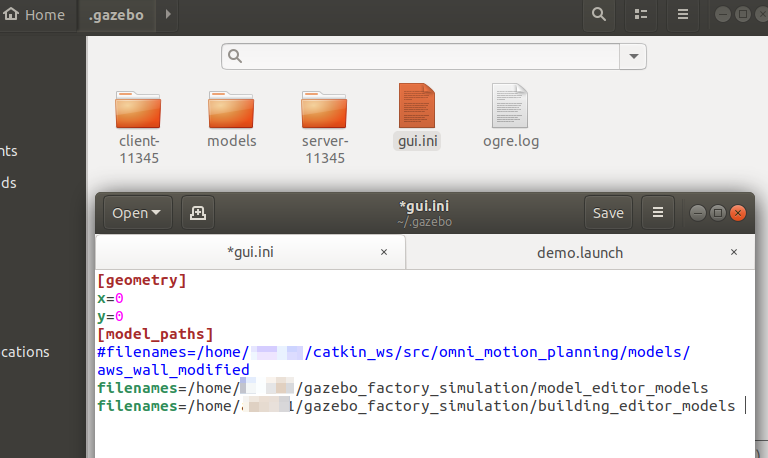
- ~/.gazebo 파일을 클릭해서 gui.ini 파일을 클릭
- 'model_paths' 아래 부분에 'filenames={추가하고자 하는 경로}' 를 넣어주고 저장( ctr + S )
ROS, Ubuntu 20.04 LTS에서 진행된 내용입니다.
요약내용
숨겨진 경로에 있습니다. (~./gazebo)
목적
Github에서 만들어진 모델을 사용할 때, 경로를 영구적으로 경로를 추가해서 Gazebo 프로그램 실행때마다 편하게 사용하고자 합니다.
아래처럼 따라하면 됩니다.
- 홈에서 숨겨진 파일을 보기 위해 'ctr + H' 을 누르기
- ~/.gazebo 파일을 클릭해서 gui.ini 파일을 클릭
- 'model_paths' 아래 부분에 'filenames={추가하고자 하는 경로}' 를 넣어주고 저장( ctr + S )